Programming in UNIX Environment
지난 포스트에 이어서 시작하겠습니다.
이번 포스트에서는 프로세스 제어와 에러 처리, 시그널, 시스템 호출과 라이브러리 함수들에 대해 간략하게 훑어보겠습니다.
Programs and Processes
Program
프로그램이 뭔가요?
프로그램이란 디스크에 있는 실행가능한 파일입니다.
프로그램은 메모리에 읽혀진 후 일곱가지 exec함수 바리에이션에 의해 커널에서 실행됩니다.
Processes & Process ID
실행되고 있는 프로그램은 process라고 부르는데, 이 다음부터 프로세스라는 말을 자주 쓸 겁니다.
UNIX 시스템은 모든 프로세스가 process ID라고 부르는 고유한 숫자 식별자를 가지도록 합니다.
프로세스 ID는 항상 양의 정수 or 0 입니다.
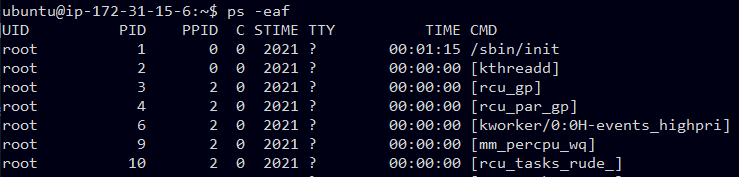
ps -eaf 커맨드 실행결과
UID PID PPID C STIME TTY TIME CMD
root 1 0 0 2021 ? 00:01:15 /sbin/init위에서 PID라고 적힌 컬럼의 숫자가 process ID입니다.
1번 프로세스는 가장 처음 시작되고 모든 프로세스의 조상 프로세스 쯤이 되는 init 프로세스인데, 나중에 살펴보겠습니다.
Process Control
프로세스를 제어하기 위해 세 가지 주요한 함수가 있는데, fork, exec(사실 7가지가 있지만 퉁쳐서 쓰겠습니다), waitpid입니다.
fork- 이 함수는 새로운 프로세스를 생성하는 역할입니다.
- 이 함수를 호출한 프로세스가 그대로 복사되어, 원래 프로세스는 부모, 복사된 프로세스는 자식 프로세스로 부릅니다.
exec- 이 함수는 호출되면 호출된 프로세스가
exec함수의 인자로 전달된 프로그램을 실행하도록 교체됩니다. fork함수와 콤비를 이뤄서 새로운 프로그램을 실행하는데 쓰입니다.- 7가지 바리에이션이 있습니다.
- 이 함수는 호출되면 호출된 프로세스가
waitpid- 새로운 프로그램을 시작할 때, 일반적으로
fork와exec를 조합하여 자식 프로세스가 새로운 프로그램을 실행하게 합니다. - 이때 부모 프로세스는 자식 프로세스가 종료하기를 기다릴 수 있는데, 이때
waitpid함수를 씁니다.
- 새로운 프로그램을 시작할 때, 일반적으로
이 포스팅에선 코드 예시를 들지는 않지만, 이 포스트에서 코드와 함께 프로세스 제어 과정을 살펴보겠습니다.
Thread & Tread ID
일반적으로, 프로세스에는 제어의 흐름이 하나만 존재합니다. 즉 실행 중에는 기계 명령들이 하나씩 실행됩니다. 이런 제어의 흐름을 스레드(thread)라고 부릅니다.
근데, 세상에는 문제를 여러 부분으로 나눈 후 여러 제어 흐름이 각 부분 문제들을 동시에 풀 때 더 쉽고 빠르게 푸는 문제도 있습니다. 이럴 땐 한 프로세스에서 여러 개의 제어 흐름(thread)를 가지는 것이 좋습니다.
한 프로세스의 모든 스레드는 동일한 메모리 영역, 파일 서술자 등등의 프로세스 관련 특징을 공유합니다. 또한 각 스레드는 자신만의 콜 스택에서 실행되지만, 서로의 스레드의 스택 중간에 끼어들 수 있습니다. 이렇게 서로 메모리를 공유하고 스택에 접근할 수 있기 때문에, 일관성을 깨지 않으려면 여러 스레드의 접근을 동기화 및 관리해주어야 합니다.
프로세스처럼 스레드도 ID(숫자)로 식별하는데, 스레드ID는 그 프로세스 안에서만 유효합니다. 즉, 한 프로세스의 스레드ID는 다른 프로세스에선 의미가 없습니다. 스레드ID는 프로세스 안에서 스레드를 다룰 때 특정 스레드를 가리키는 용도로 사용됩니다.

ps -LF 커맨드 실행결과
위의 결과에서 보면 LWP가 스레드ID를, NLWP가 해당 프로세스에서 동작하는 스레드의 갯수를 가리킵니다.
NLWP가 모두 1인 것을 보면, ubuntu 사용자의 각 프로세스마다 스레드를 한 개씩 쓰고 있는 것으로 보입니다.

ps -LFu 104 커맨드 실행결과
위의 결과에서는 syslog 사용자(UID: 104)의 프로세스와 스레드 정보인데, 454번 프로세스는 NLWP가 4이므로 총 4개(454, 505, 506, 507)의 스레드를 사용하고 있습니다.
스레드와 프로세스의 상호작용, 스레드에 대한 더 깊은 이야기는 이 포스트에서 다루겠습니다.
Signal
신호(signal, 이하 시그널로 칭함)라는 것은 프로세스에게 어떤 상황(condition)이 발생했음을 알리는 방법입니다.
예를 들어서, 프로세스가 0으로 나누는 계산을 했다면 SIGFPE(floating-point exception)라는 시그널이 프로세스에게 보내집니다.
프로세스는 시그널을 받았을 때 3가지 선택지가 있습니다.
- 시그널을 무시하기.
- 시그널 중에는 0으로 나누기나 프로세스에 할당된 메모리 주소를 벗어난 메모리 접근 등을 가리키는 하드웨어 예외를 뜻하는 시그널이 있습니다.
- 이런 시그널은 프로세스 계산 결과가 정의되지 않게 되므로 무시하지 않는게 좋습니다.
- 기본 동작 수행하기.
- 모든 시그널은 각 시그널마다 정의된 기본 동작이 있습니다.
- 예를 들어, 0으로 나누는 상황의 시그널은 기본 동작이 프로세스를 종료하는 것입니다.
- 시그널을 처리할 함수를 호출하기.
- 이 함수를 시그널 핸들러(signal handler)라고 부르고, “시그널을 잡는다(catching the signal)“라고 표현합니다.
- 사용자 정의 함수를 호출하여 시그널이 언제 발생되는지 알고 그것을 원하는 방식으로 처리할 수 있게 됩니다.
시그널을 발생시키는 조건은 많습니다.
Interrupt key(ex. Ctrl+C)와 Quit key(ex. Ctrl+\)라고 부르는 두 종료 키를 누르면 현재 실행중인 프로세스에 시그널(SIGINT)이 보내집니다.
Ctrl+C(^C)를 눌러서 SIGINT 시그널을 보내 무한 루프 프로세스를 종료하기
시그널을 발생시키는 다른 방법은 kill 함수를 호출하는 것입니다.
이 함수를 호출하여 한 프로세스에서 다른 프로세스로 시그널을 보낼 수 있습니다.
하지만 kill함수를 사용하여 다른 프로세스에 시그널을 보내려면 사용자가 시그널 수신 프로세스의 소유자(혹은 슈퍼유저)이어야 합니다.
이 포스트에서 시그널에 대해 더 자세히 보겠습니다.
Error Handling
UNIX 시스템에서는 대체로 오류가 발생하면 음의 값을 리턴합니다.
그리고 errno라는 정수 값이 설정되어 오류 원인을 알려줍니다.
예를 들어, open 함수가 성공적으로 호출되면 양수 값의 파일 서술자를 리턴하고, 오류가 있었으면 -1을 리턴합니다.
open함수에서 가능한 오류에 해당하는 errno 값은 15가지입니다.
어떤 함수들은 음수 값을 리턴하기 보다는 다른 관례가 있는 함수도 있습니다. 예를 들면, 어떤 객체를 향하는 포인터를 반환하는 대부분의 함수는 오류 시에 null 포인터를 리턴합니다.
errno
<errno.h> 헤더 파일에는 errno 심볼과 errno에 설정될 수 있는 각 값에 대한 상수들이 정의되어 있습니다.
이 상수들은 문자 E로 시작하는 이름을 가지고 있습니다.
예를 들어서, errno가 상수 EACCES와 같은 값을 가지고 있다면, 이것은 요청된 파일에 대해 권한이 없는 등의 권한 에러가 발생한 것을 뜻합니다.
POSIX와 ISO C 표준은 errno를 정수 타입의 수정가능한 lvalue 심볼로 정의합니다. 이 정의에 따르면 errno는 에러 번호를 담은 정수가 될 수도 있고, 오류 번호를 가리키는 포인터를 리턴하는 함수가 될 수도 있습니다.
일반적으로 errno를 에러 번호를 담은 정수로 정의한다면, 다음과 같을 겁니다.
extern int errno;하지만, 다중 스레드를 지원하는 환경에서는 프로세스의 메모리/주소 공간을 여러 스레드가 공유합니다.
따라서 스레드 사이에서 오류 번호가 섞이지 않으려면 각 스레드마다 개별적으로 errno의 복사본을 가져야 합니다.
이런 상황에선 errno를 다음과 같이 오류 번호를 가리키는 포인터를 리턴하는 함수로 정의하여 다중 스레드 접근을 지원할 수 있습니다.
extern int *_ _errno_location(void);
#define errno (*_ _errno_location())errno와 관련해서 중요한 규칙이 두 가지 있습니다.
- 어떤 루틴에서 오류가 발생하지 않는다 해도,
errno값은 비워지지 않습니다.- 따라서 에러를 처리할 때는 함수의 리턴값을 통해 에러가 발생한 것을 먼저 알아내고, 그 원인을
errno값에서 분석해야 합니다.
- 따라서 에러를 처리할 때는 함수의 리턴값을 통해 에러가 발생한 것을 먼저 알아내고, 그 원인을
- 어떤 함수도
errno값을 0으로 설정할 수 없으며,<errno.h>파일에 정의된 모든 상수는 0의 값을 가지지 않습니다.
Error Recovery
<errno.h>파일에 정의된 에러들은 두 가지 분류로 나눌 수 있습니다.
- 치명적 오류(fatal error)
- 치명적 오류는 복구 동작이 없고, 그저 로그 파일이나 스크린에 에러 메시지를 출력한 후 프로세스를 종료해야 합니다.
- 비치명적 오류(nonfatal error)
- 비치명적 오류는 더 안정적으로 처리할 수 있습니다.
- 대부분의 비치명적 오류는 리소스가 부족한 경우처럼 일시적이며, 시스템이 널널하면 발생하지 않을 수도 있습니다.
리소스 관련 비치명적 오류의 전형적인 복구 동작은 잠시 기다렸다가 다시 시도하는 것입니다. 이 기술은 다른 다양한 상황에서도 적용할 수 있습니다. 예를 들어, 응용 프로그램에서 네트워크 연결이 더이상 작동하지 않는다는 오류가 발생하면, 프로그램은 잠시 기다렸다가 재연결을 시도할 수 있습니다.
응용 프로그램이 오류를 복구할 수 있는 경우를 결정하는 것은 결국 응용 프로그램 개발자의 과업입니다. 합리적인 복구 전략을 사용한다면 프로그램이 비정상 종료를 회피하고 더욱 견고하게 만들 수 있습니다.
System Calls & Library Functions
System Call
모든 운영체제는 프로그램이 커널에게 서비스를 요청할 수 있는 서비스 지점(service point)를 제공합니다. UNIX 시스템에서 커널에 대한 서비스 포인트를 시스템 호출이라고 부릅니다. UNIX 시스템은 각 시스템 콜마다 똑같은 이름의 함수를 C 표준 라이브러리에 정의하였습니다. 사용자 프로세스는 표준 C 호출 시퀀스를 이용해서 이 함수들을 호출합니다. 그럼 이 함수들은 해당 커널 서비스를 실행합니다.
Library Function
시스템 콜 말고도, 프로그래머들은 프로그래밍을 쉽게 해주는 범용 라이브러리 함수를 사용할 수 있습니다.
이 함수들은 커널의 시스템 콜을 호출할 수 있긴 하지만, 커널에 대한 진입점은 아닙니다.
예를 들면 printf함수는 문자열을 출력하기 위해 write 시스템 콜을 활용할 수 있지만, strcpy(문자열을 복사)나 atoi(아스키 코드를 정수로 변환)은 커널과 관련이 없습니다.
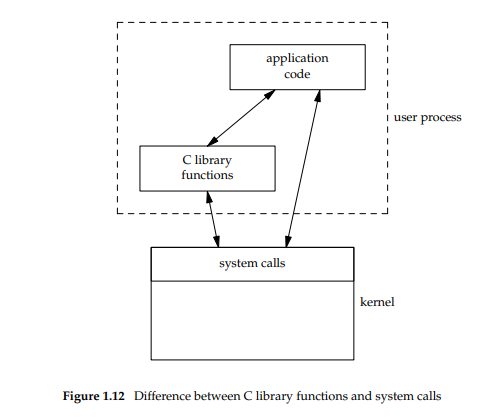
Diffrence between system call & library function
구현자의 입장에서는 시스템 콜과 라이브러리 함수를 구분하는 것이 중요합니다. 하지만 사용자의 입장에서는, 차이가 별로 없습니다. 특히 UNIX 시스템에서는 라이브러리 함수와 시스템 콜이 둘 다 일반적인 C 함수의 형태를 하고 있고, 둘 다 응용 프로그램에게 서비스를 제공합니다.
유의해야 할 점은 라이브러리 함수는 다른 라이브러리 함수로 대체할 수 있어도, 시스템 콜은 대체할 수 없다는 점입니다.
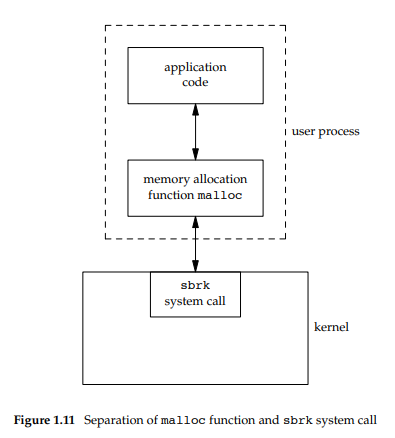
메모리를 할당하는 라이브러리 함수 malloc의 경우를 살펴보겠습니다.
malloc 함수는 커널의 영역인 메모리 관리를 하기 위해 sbrk 시스템 콜을 호출하여 처리합니다.
이때 sbrk 시스템 콜은 단순히 프로세서의 주소 공간을 지정된 바이트 개수만큼 늘리거나 줄이기만 합니다.
주소 공간의 구체적인 관리와 그 공간을 어떠한 처리를 하는 것은 응용 프로그램과 malloc 함수가 하게 됩니다.
이때 나만의 malloc 함수를 정의하여 쓸 수 있겠지만, 그 함수에서도 sbrk 시스템 콜은 항상 사용해야 합니다.
또 다른 차이로는 시스템 콜은 최소한의 인터페이스를 제공하지만, 라이브러리 함수는 더 정교한 기능성을 제공한다는 것입니다.
이것은 이미 위의 malloc 예시에서 보았습니다.
이후에 non-buffered I/O와 standard I/O를 비교해보아도 차이가 느껴질 겁니다.
응용 프로그램은 그 기능을 구현하기 위해 라이브러리 함수와 시스템 콜 모두 활용할 수 있습니다.
특히 프로세스 제어를 위한 시스템 호출(fork, exec, waitpid)은 주로 응용 프로그램이 직접 호출합니다.
하지만 이런 보편적인 사용법을 단순화하기 위해 system이나 popen같은 라이브러리 함수도 존재합니다.
Finish
이번 포스트에서는 저번 포스트에 이어서 유닉스 시스템 개요에 대해 살펴보았습니다. 다음 포스트부터는 차근차근 여러 유닉스 시스템의 구성요소에 대해 살펴보도록 하겠습니다.